|
I am a Postdoctoral Research Associate at the Robot Learning Lab at Imperial College London, working with Professor Edward Johns, starting from November 2025. I received the Ph.D. degree in Electrical and Computer Engineering from Duke University in September 2025, under the supervision of Professor Michael Zavlanos and Professor Boyuan Chen. Prior to that, I obtained my bachelor of engineering degree from the Department of Automation at Tsinghua University. Email / Resume / Research Statement / Transcript / Google Scholar / Github |

|
|
My area of research is robot learning. I am currently working on the ARIA-funded project ‘Democratising Co-Design of Hardware and Control for Robot Dexterity’ project in the Robot Dexterity program. My research focuses on developing robot learning methods for complex behavior, efficient generalization, and strong robustness. |
|
|
|

|
Pingcheng Jian, Xiao Wei, Yanbaihui Liu, Samuel A. Moore, Michael M. Zavlanos, Boyuan Chen arXiv / video /
|
|
Pingcheng Jian, Easop Lee, Zachary I. Bell, Michael M. Zavlanos, Boyuan Chen project website / arXiv / OpenReview / video / We present Perception Stitching that enables strong zero-shot adaptation to large visual changes by directly stitching novel combinations of visual encoders. |
|
|
|
|
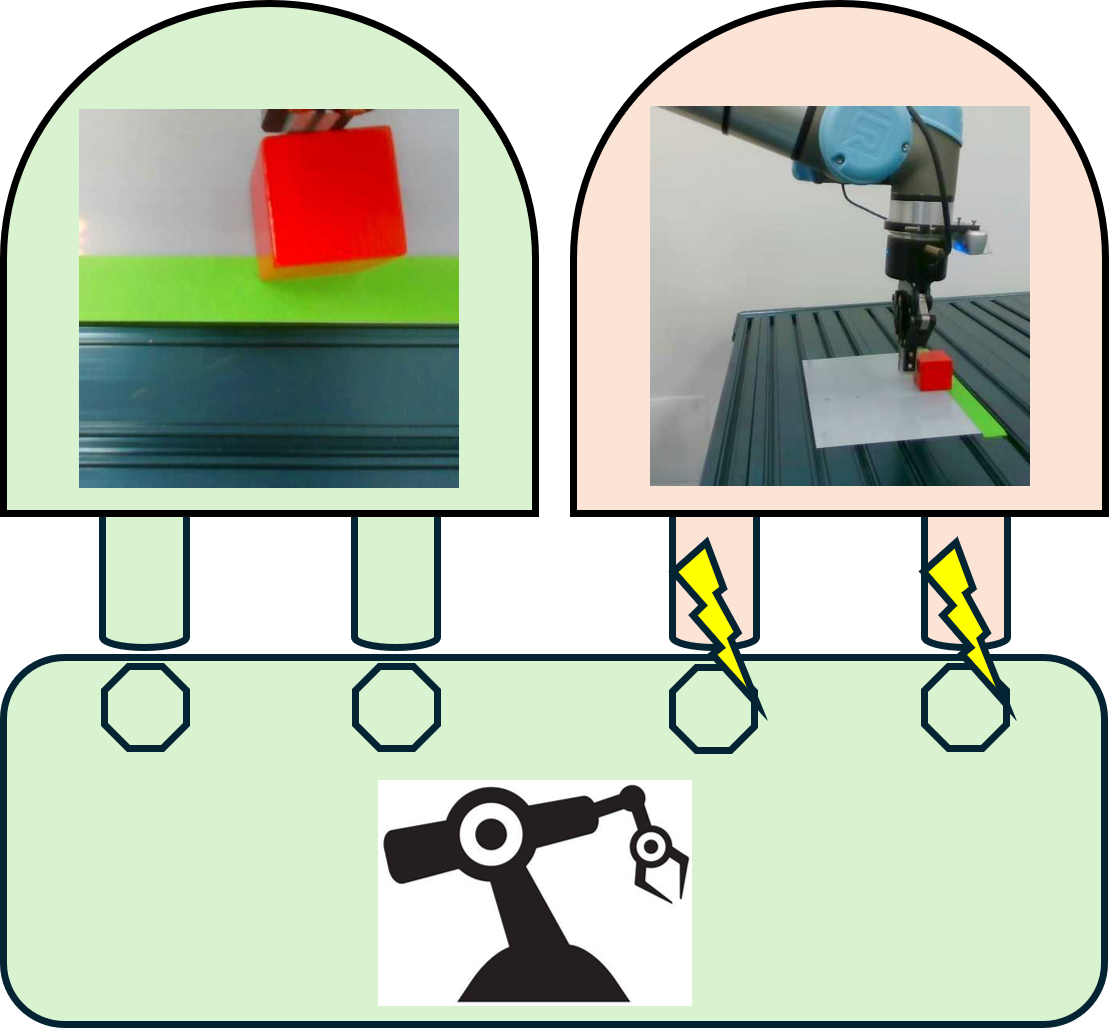
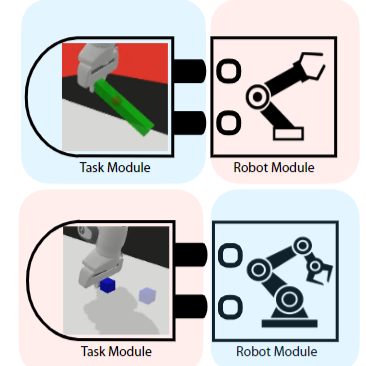
Pingcheng Jian, Easop Lee, Zachary Bell, Michael M. Zavlanos, Boyuan Chen project website / arXiv / video / CoRL talk / We propose Policy Stitching, a novel framework to facilitate multi-task and multi-robot transfer. |
|
Pingcheng Jian*, Chao Yang*, Di Guo, Huaping Liu, Fuchun Sun arXiv / video / code / Using adversarial reinforcement learning to imrove the robustness of robotic manipulation. |
|
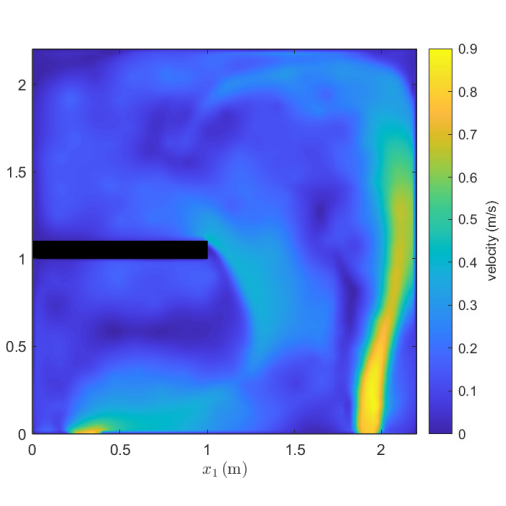
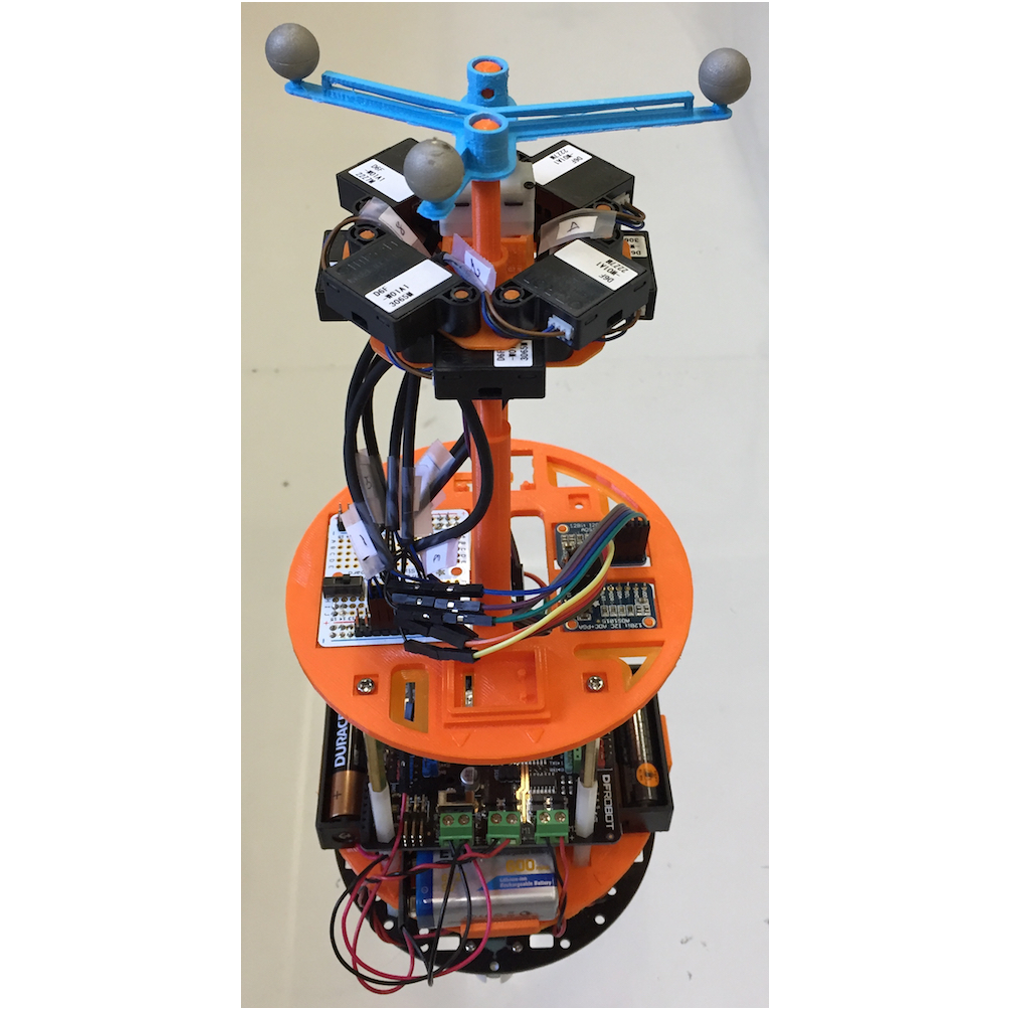
Reza Khodayi-mehr, Pingcheng Jian, Michael M. Zavlanos arXiv / We propose a physics-based method to learn environmental fields (EFs) using a mobile robot. |
|
|
|
|
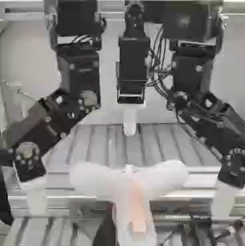
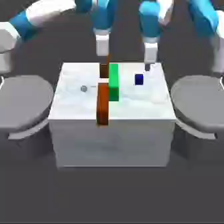
Minghao Zhang*, Pingcheng Jian*, Yi Wu, Huazhe Xu, Xiaolong Wang project website / arXiv / video / Solve complex bimanual robot manipulation tasks on multiple objects with disentangled attention, which provides an intrinsic regularization for two robots to focus on separate sub-tasks and objects. |
|
Chinese Invention Patent: A Method and System for Generating Packing Solutions for Items in a Logistics Warehouse (Publication No.: CN110443549B, Application No.: 2019106808700) |
|
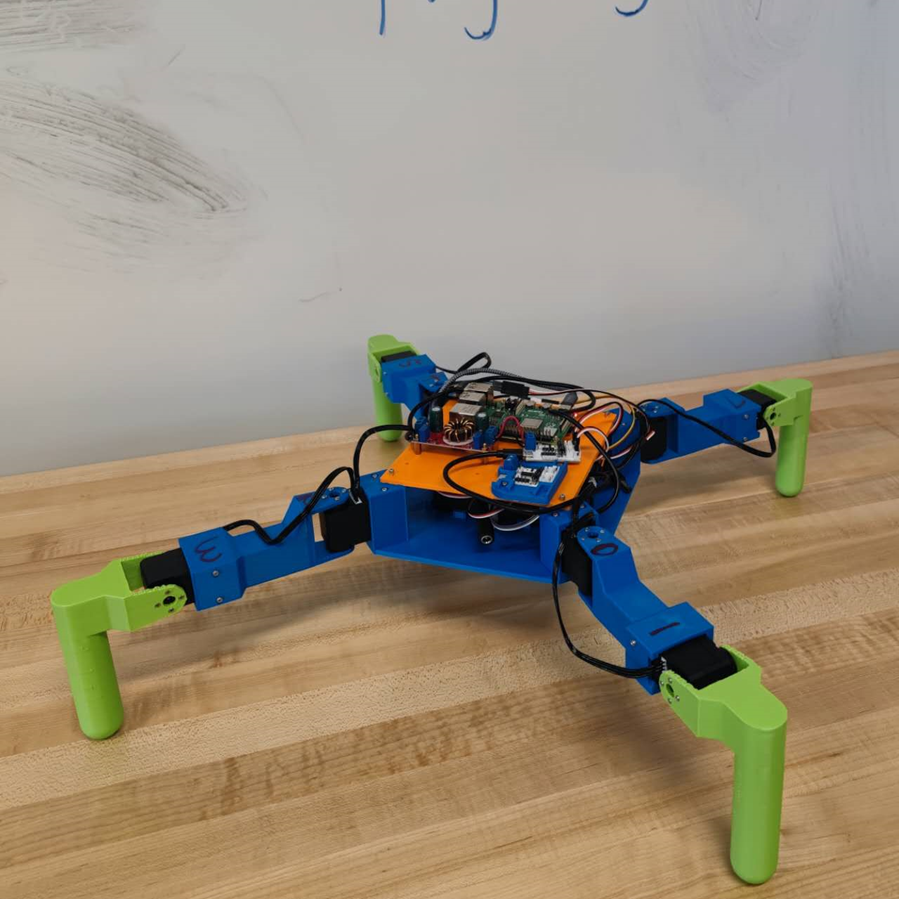
Some course projects show my engineering capability. |
|
/ video / I built all the hardware and software of this spider robot from scratch. I drew the parts of this robot with SOLIDWORKS and then printed them with 3D printer. The controller of this robot is a Raspberry Pi, and the control algorithm is written in Python. Then I generated the .urdf files of this robot and built the simulator of this robot with PyBullet. |
|
Reviewer: Conference on Robot Learning (CoRL), 2024 Conference on Robot Learning (CoRL), 2025 |
|
Teaching Assistant at Duke: ECE 382L/ME 344L - Control of Dynamic Systems / lecture / recitation / Teaching Assistant at Duke: ECE 689/COMPSCI 676 - Advanced Topics in Deep Learning |